publications
-
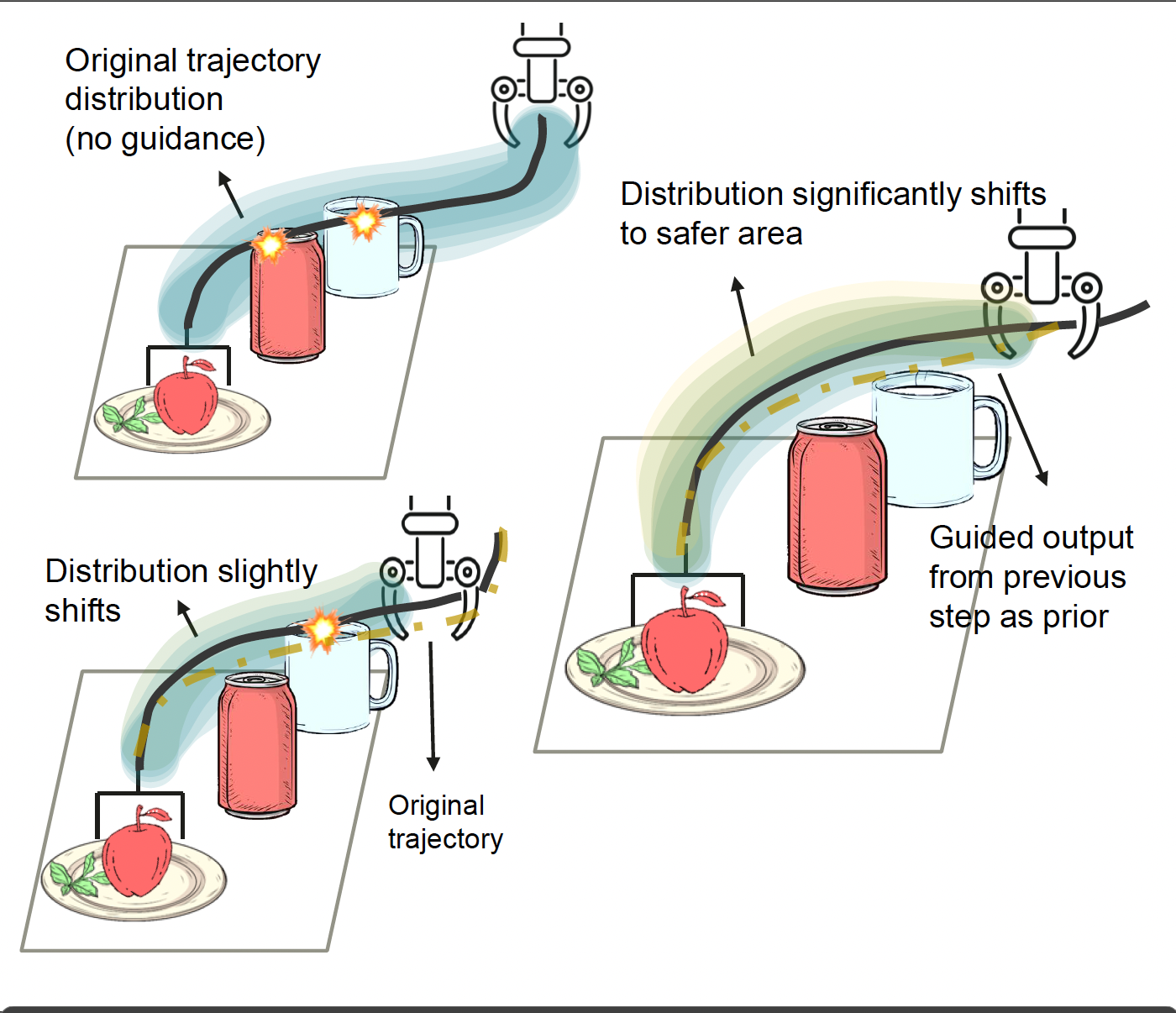 CAPE: Context-Aware Diffusion Policy Via Proximal Mode Expansion for Collision AvoidancearXiv preprint arXiv:2511.22773, 2025
CAPE: Context-Aware Diffusion Policy Via Proximal Mode Expansion for Collision AvoidancearXiv preprint arXiv:2511.22773, 2025 -
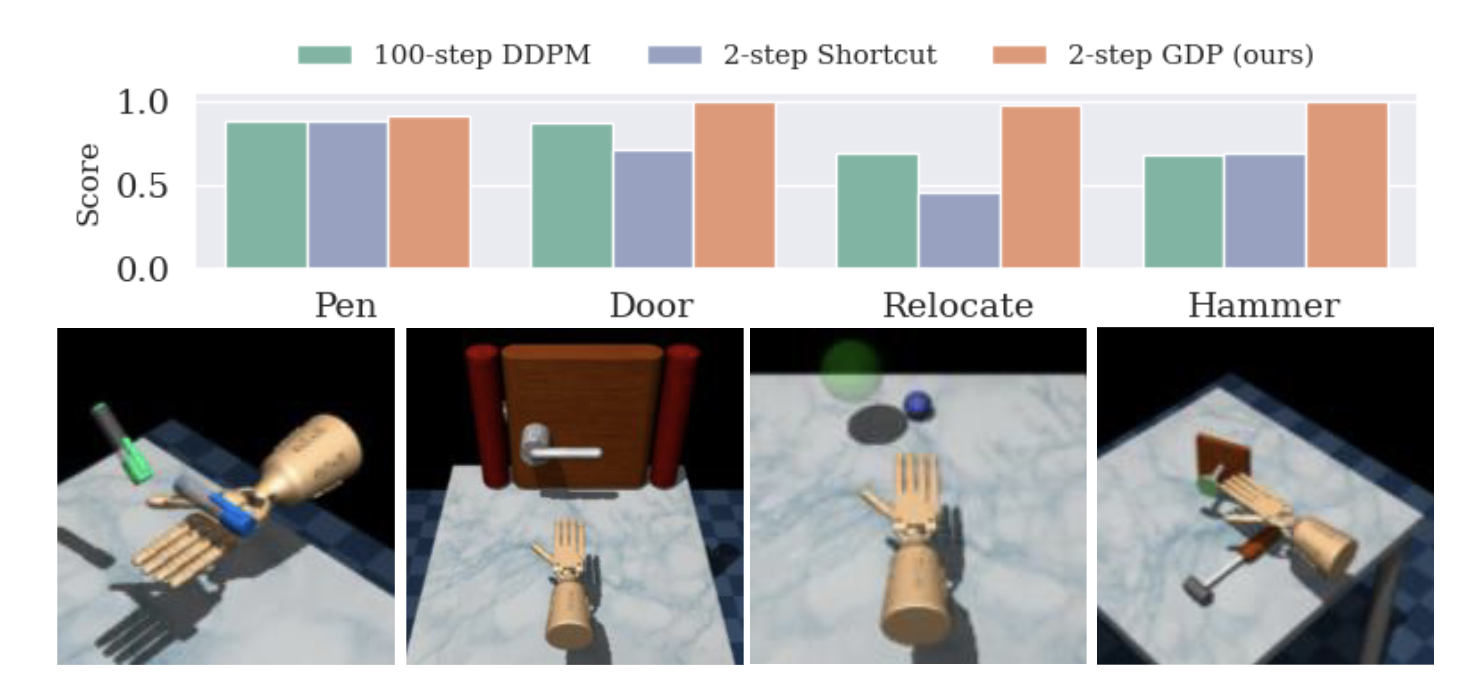 Two-Steps Diffusion Policy for Robotic Manipulation via Genetic DenoisingThe Thirty-ninth Annual Conference on Neural Information Processing Systems, 2025
Two-Steps Diffusion Policy for Robotic Manipulation via Genetic DenoisingThe Thirty-ninth Annual Conference on Neural Information Processing Systems, 2025 -
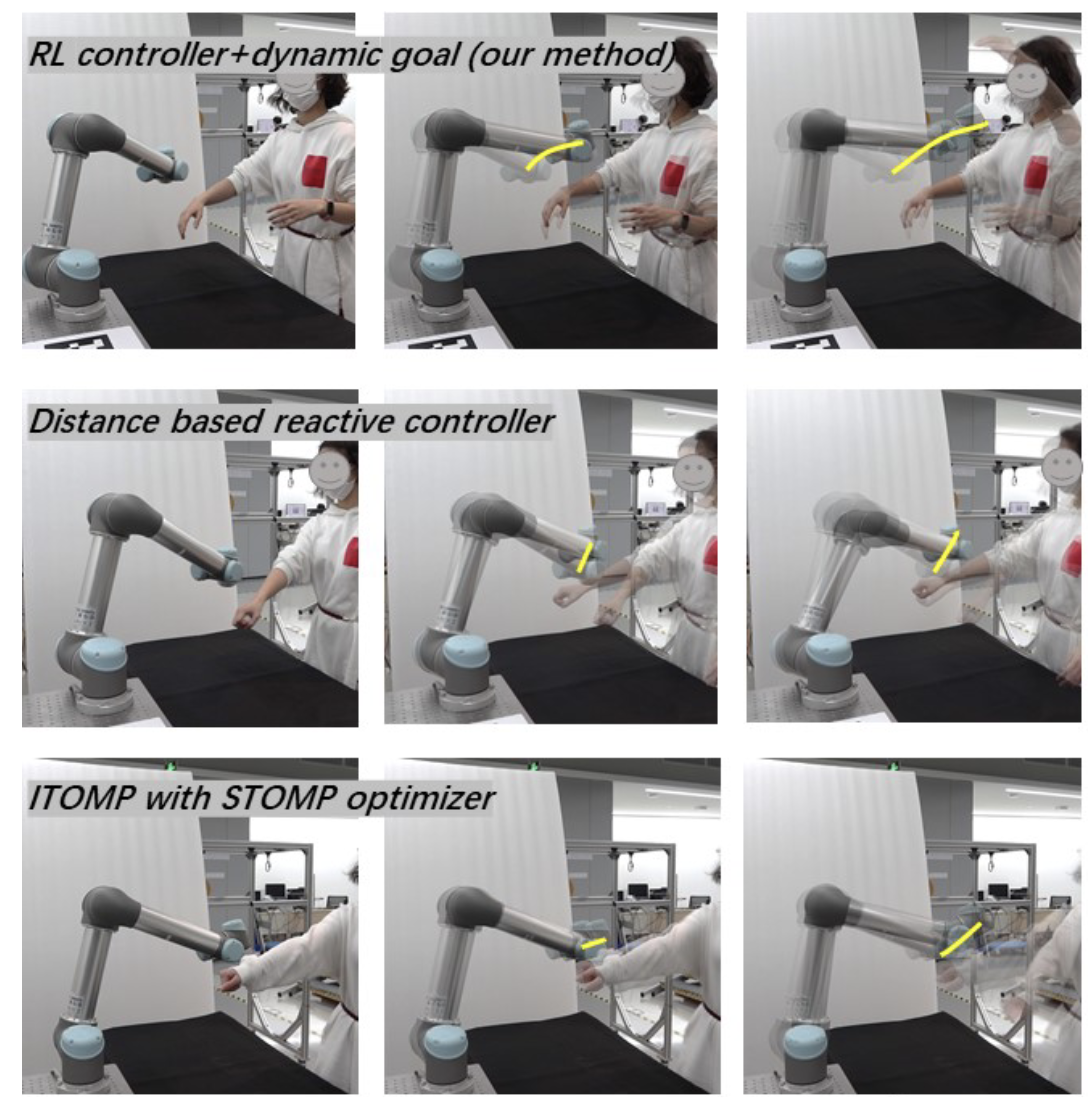
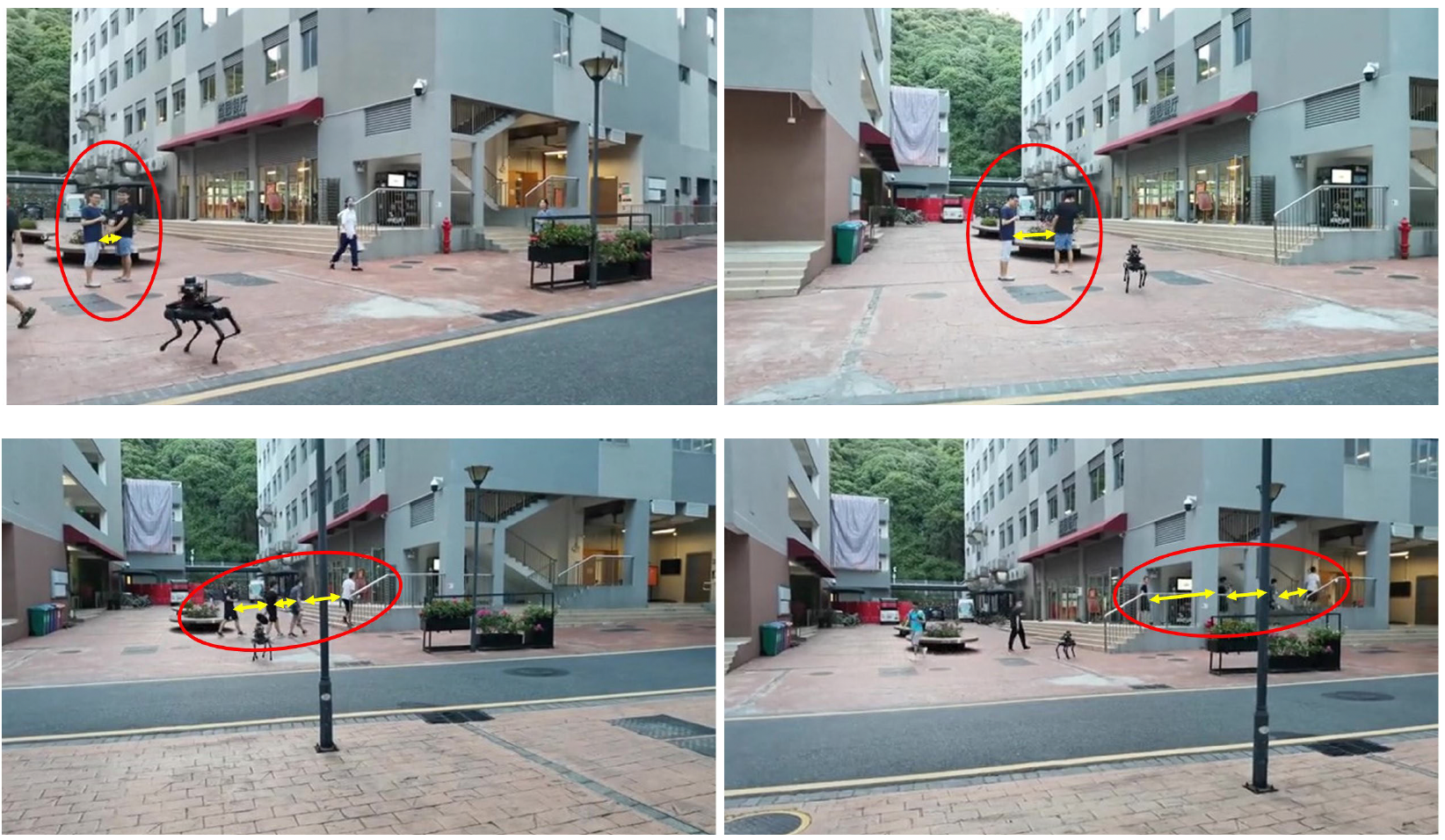
 An efficient and responsive robot motion controller for safe human-robot collaborationIEEE Robotics and Automation Letters, 2021
An efficient and responsive robot motion controller for safe human-robot collaborationIEEE Robotics and Automation Letters, 2021 -
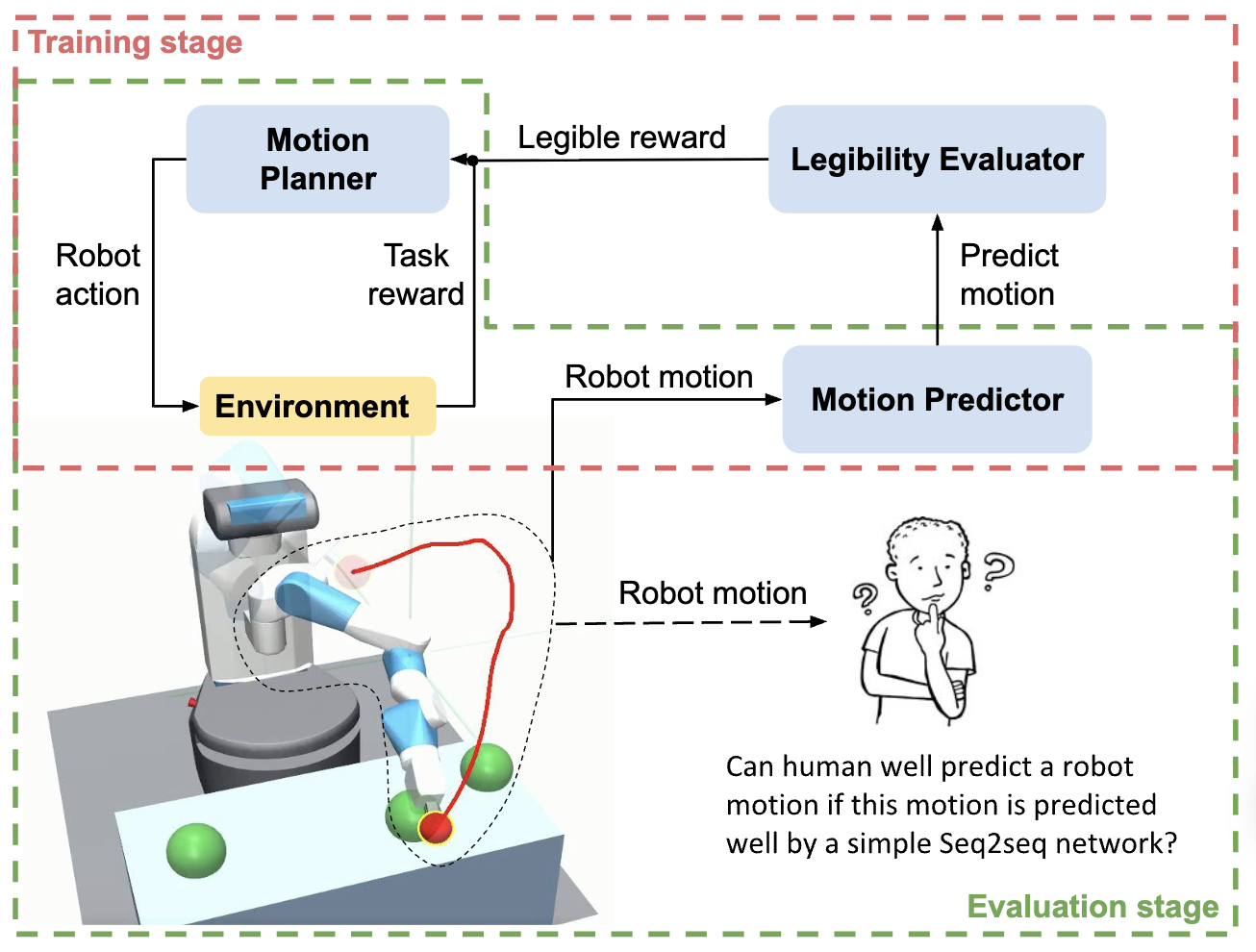
 An Actor-Critic Approach for Legible Robot Motion PlannerIn 2020 IEEE International Conference on Robotics and Automation (ICRA), 2020
An Actor-Critic Approach for Legible Robot Motion PlannerIn 2020 IEEE International Conference on Robotics and Automation (ICRA), 2020 -
-
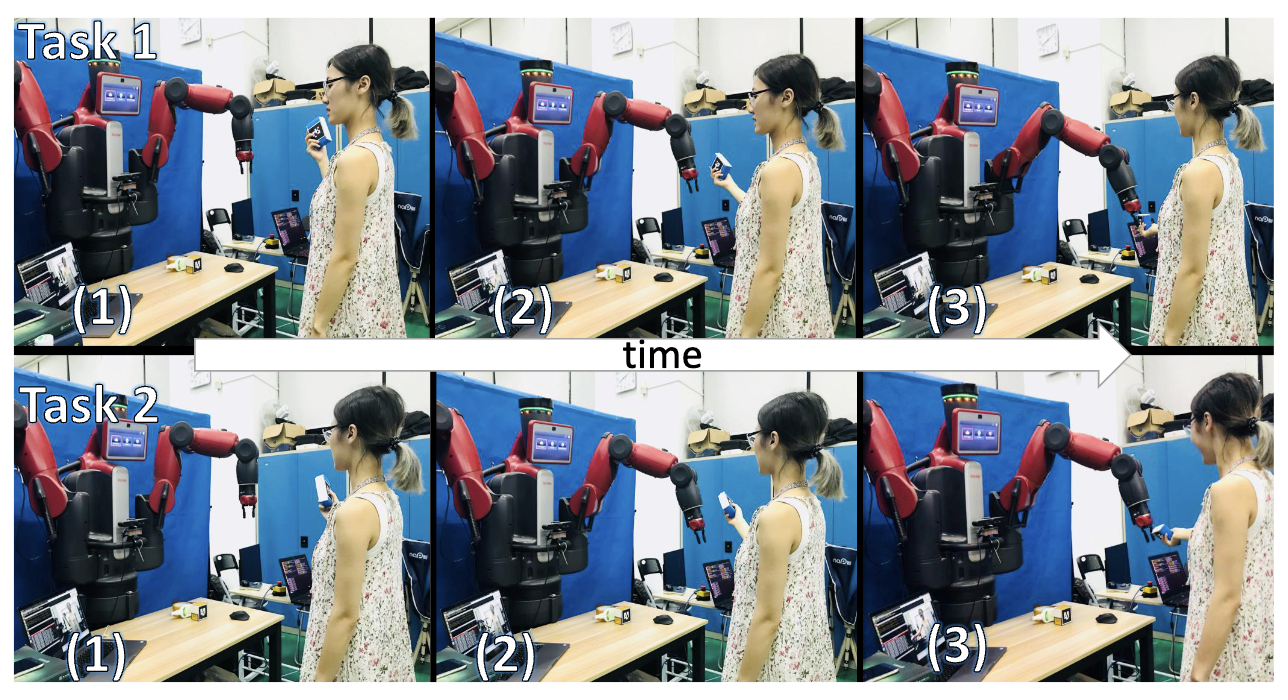 Collaborative human-robot motion generation using LSTM-RNNIn 2018 IEEE-RAS 18th International Conference on Humanoid Robots (Humanoids), 2018
Collaborative human-robot motion generation using LSTM-RNNIn 2018 IEEE-RAS 18th International Conference on Humanoid Robots (Humanoids), 2018 -
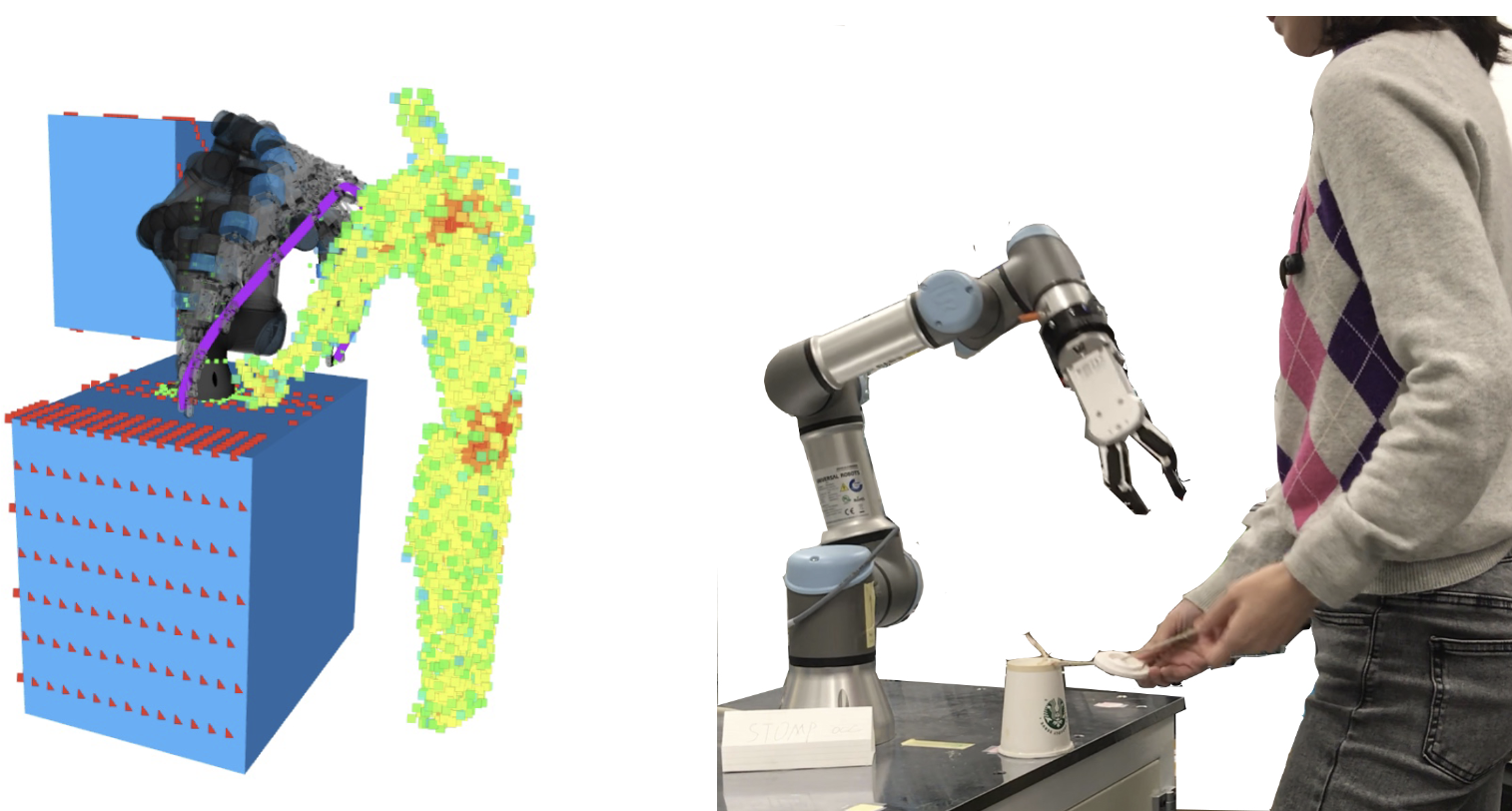 Considering human behavior in motion planning for smooth human-robot collaboration in close proximityIn 2018 27th IEEE International Symposium on Robot and Human Interactive Communication (RO-MAN), 2018
Considering human behavior in motion planning for smooth human-robot collaboration in close proximityIn 2018 27th IEEE International Symposium on Robot and Human Interactive Communication (RO-MAN), 2018 -
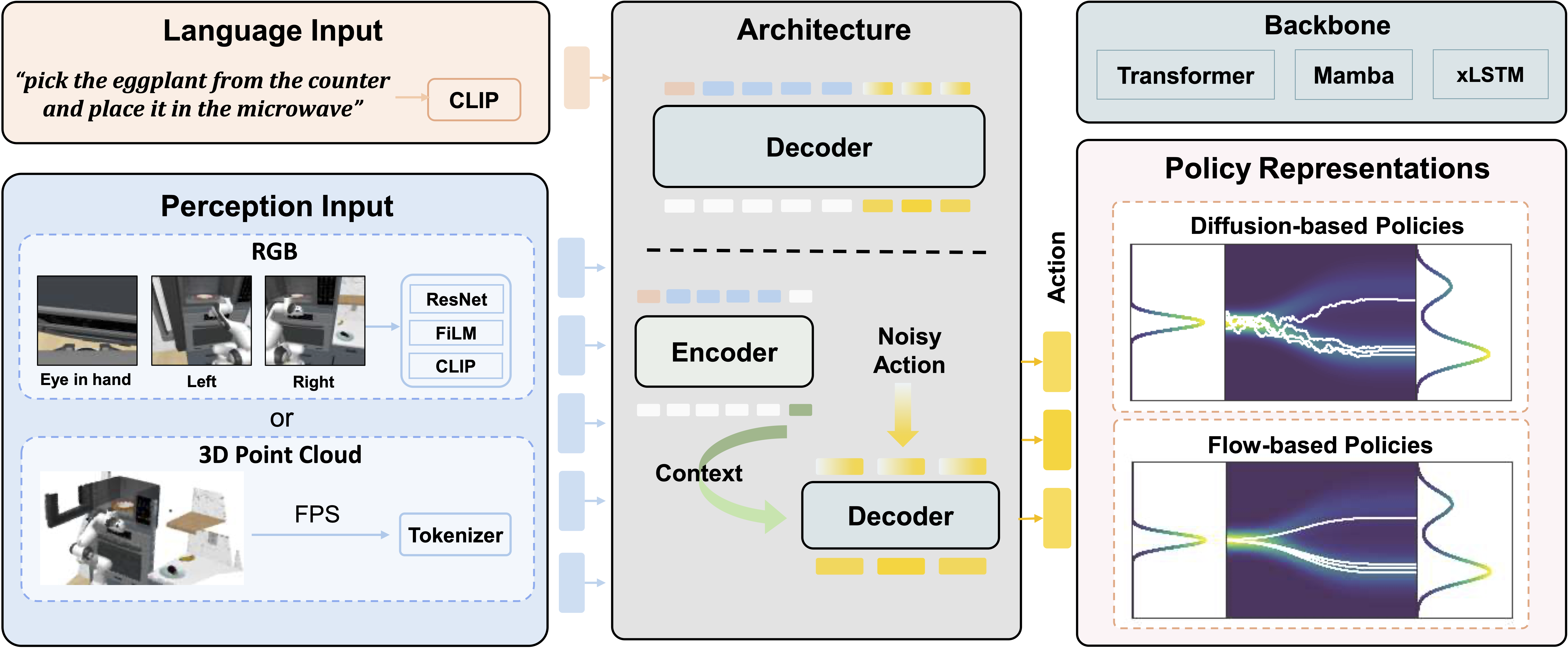
Distracted Robot: How Visual Clutter Undermine Robotic ManipulationarXiv preprint arXiv:2511.22780, 2025
-
Robust shape estimation for 3D deformable object manipulationarXiv preprint arXiv:1809.09802, 2018
-
A Computational Framework for Robot Hand Design via Reinforcement LearningIn 2021 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2021
-
General driving behavior model based on the desired safety margin for vehicle flow simulationIn 2022 IEEE 25th International Conference on Intelligent Transportation Systems (ITSC), 2022