Xuan Zhao

I am a senior researcher at Noah’s Ark Lab focusing on robot learning and motion planning. My goal is to build autonomy systems that react smoothly, behave predictably and work in real environments.
I earned my PhD in robotics at City University of Hong Kong, where I was advised by Prof. Jia Pan and worked on human robot interaction and motion planning. Before that, I earned my MSc in Robotics from the University of Bristol and received my BEng from Xi’an Jiaotong University.
Research interest: imitation learning, reinforcement learning, motion planning
news
| Nov 22, 2025 | Launched my personal website to share updates on research and projects. |
|---|
selected publications
-
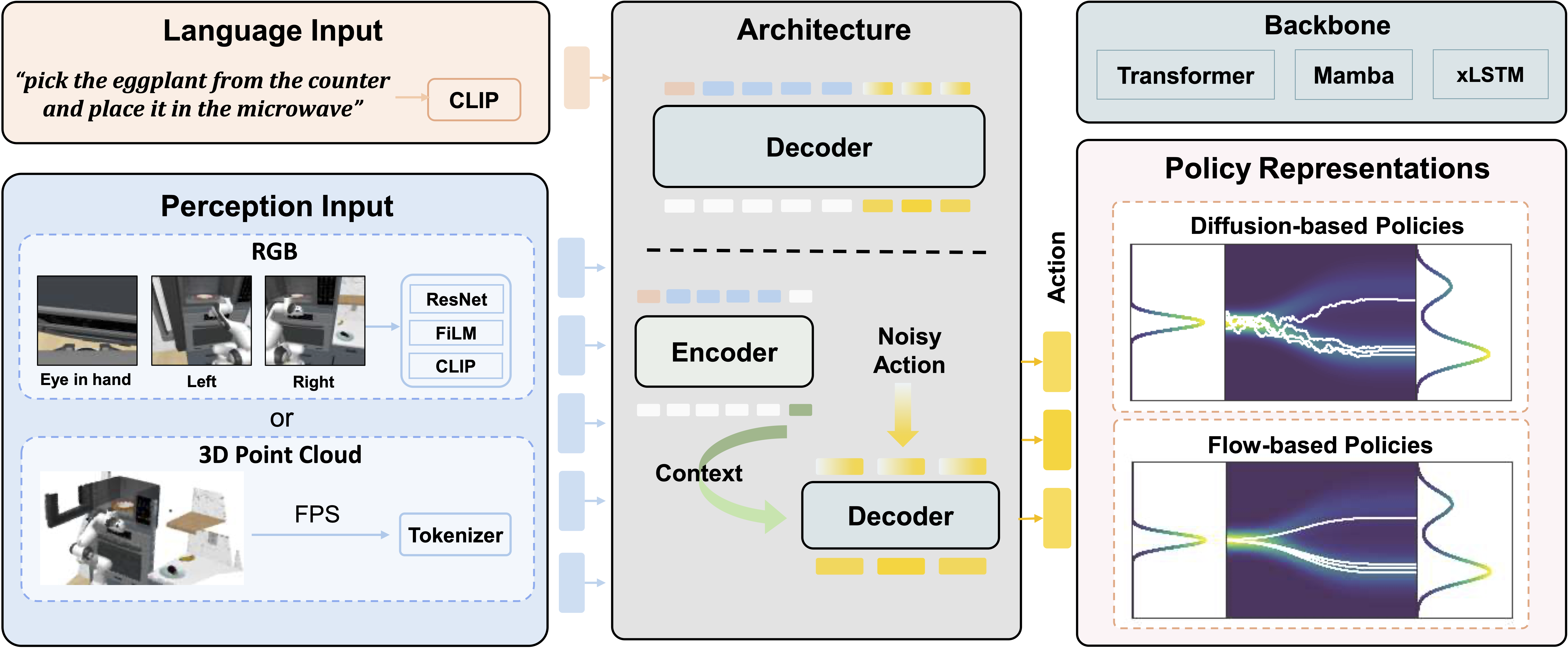
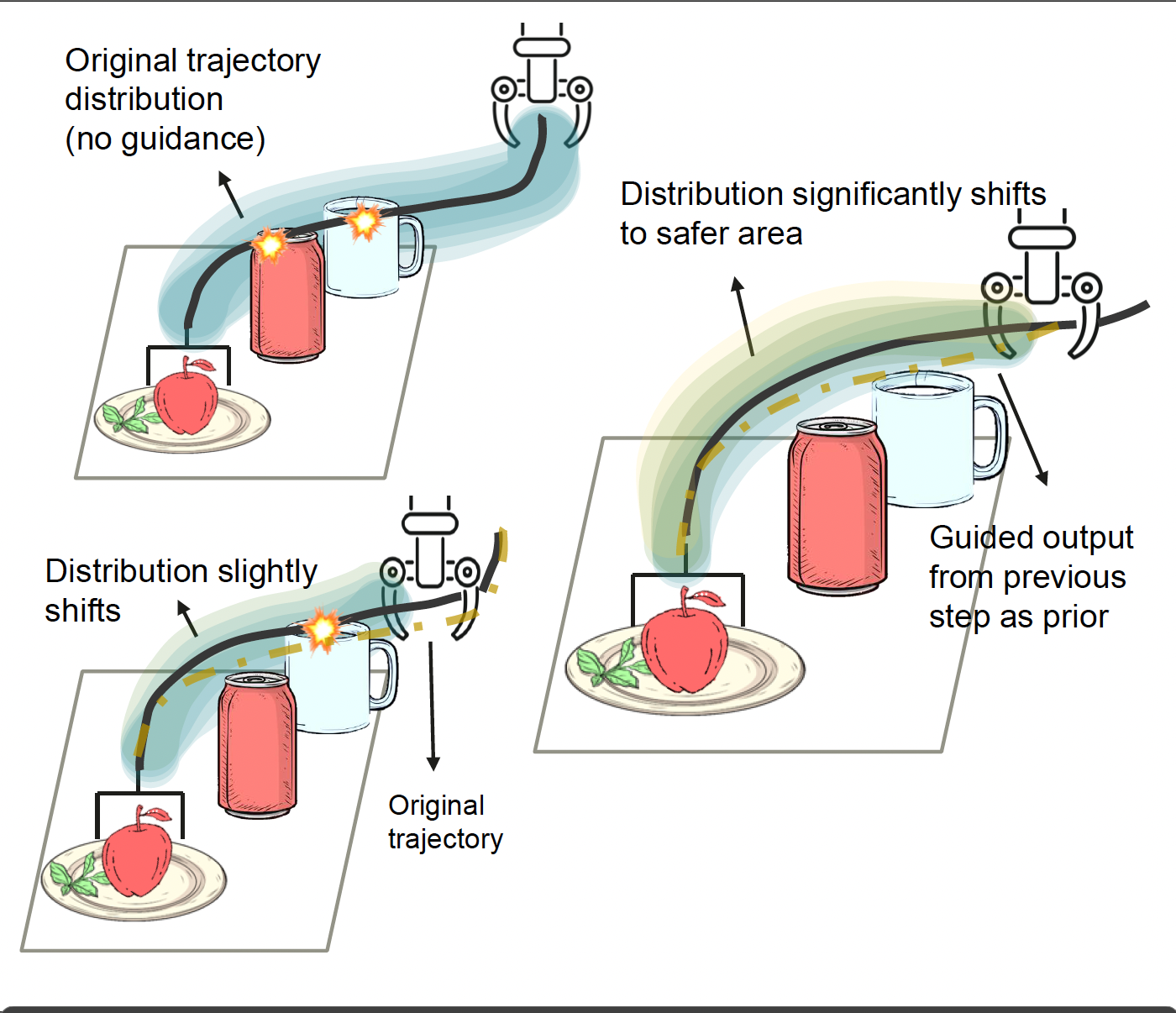 CAPE: Context-Aware Diffusion Policy Via Proximal Mode Expansion for Collision AvoidancearXiv preprint arXiv:2511.22773, 2025
CAPE: Context-Aware Diffusion Policy Via Proximal Mode Expansion for Collision AvoidancearXiv preprint arXiv:2511.22773, 2025 -
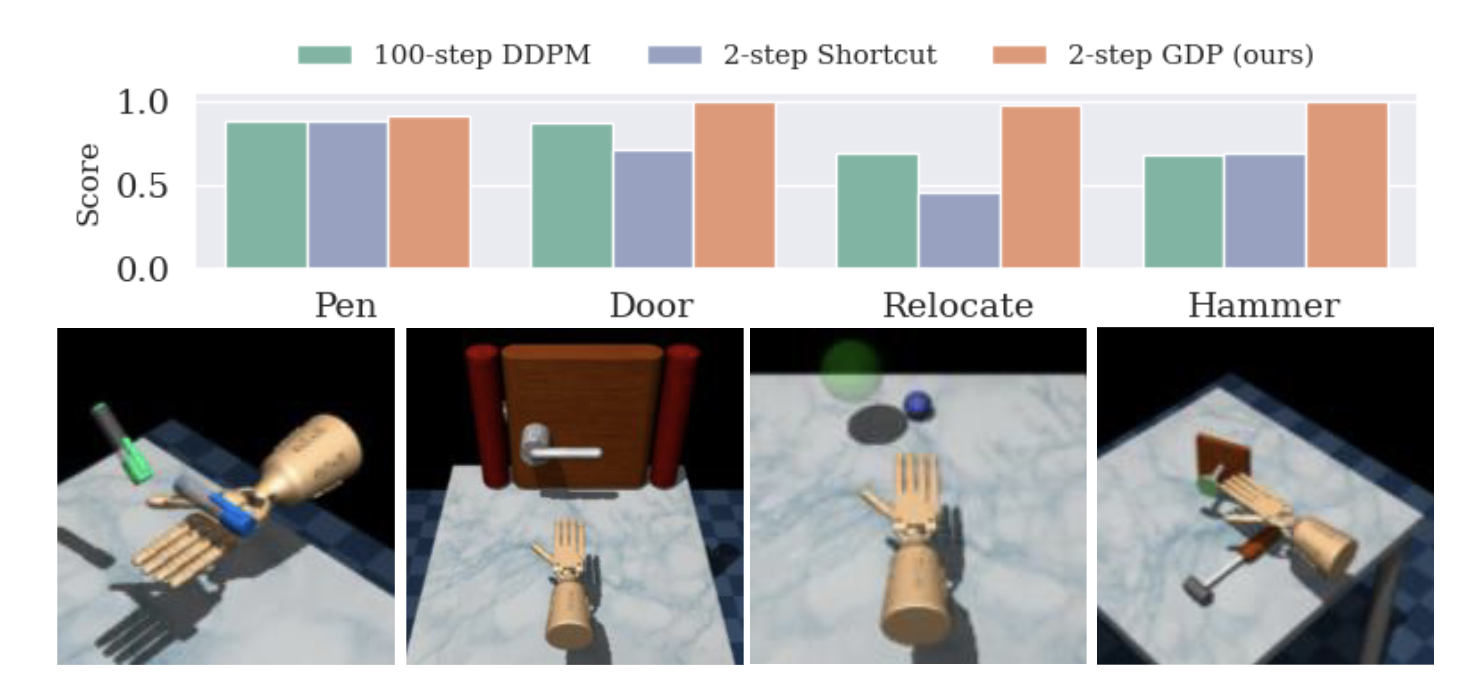 Two-Steps Diffusion Policy for Robotic Manipulation via Genetic DenoisingThe Thirty-ninth Annual Conference on Neural Information Processing Systems, 2025
Two-Steps Diffusion Policy for Robotic Manipulation via Genetic DenoisingThe Thirty-ninth Annual Conference on Neural Information Processing Systems, 2025 -
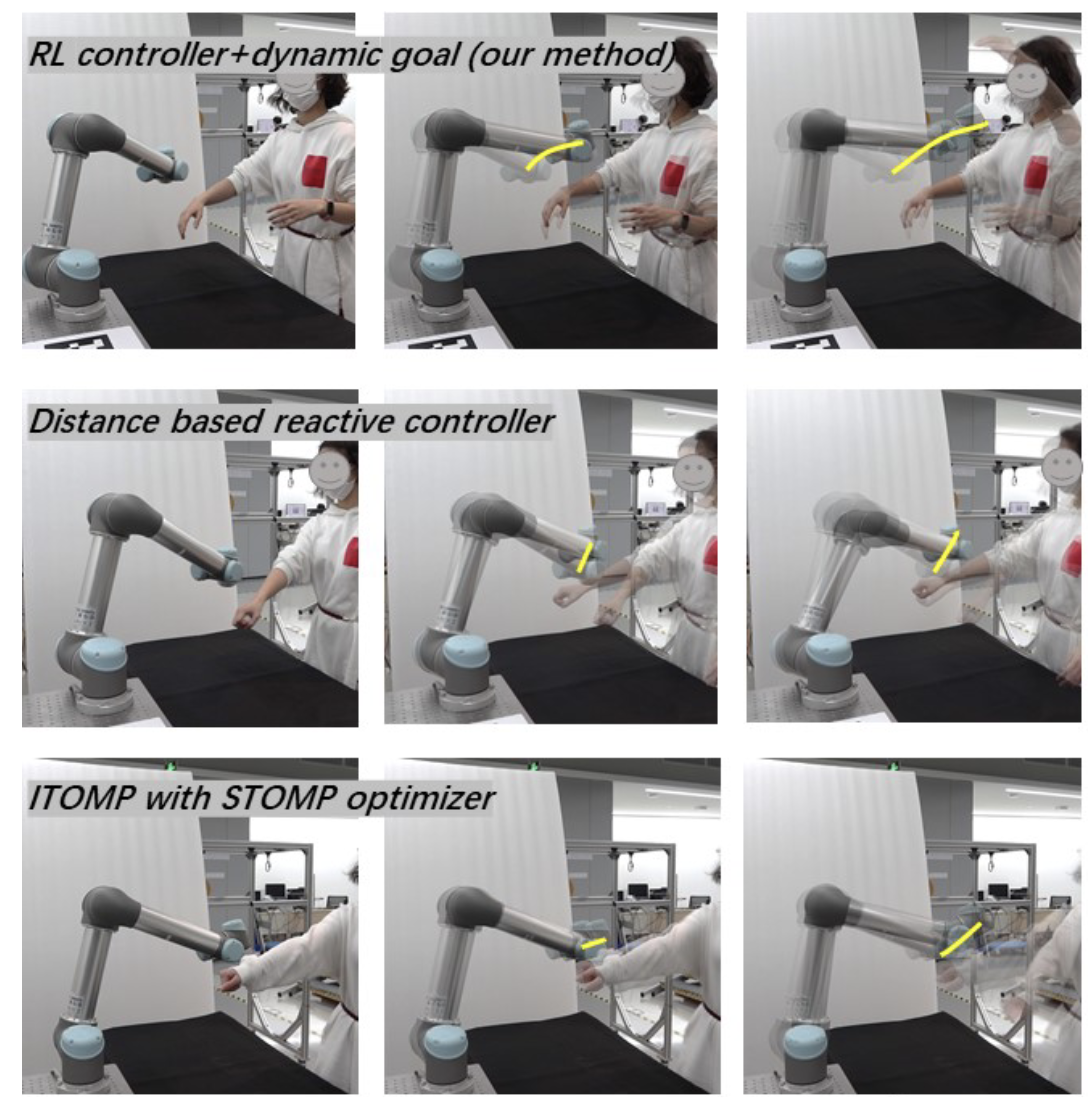
 An efficient and responsive robot motion controller for safe human-robot collaborationIEEE Robotics and Automation Letters, 2021
An efficient and responsive robot motion controller for safe human-robot collaborationIEEE Robotics and Automation Letters, 2021 -
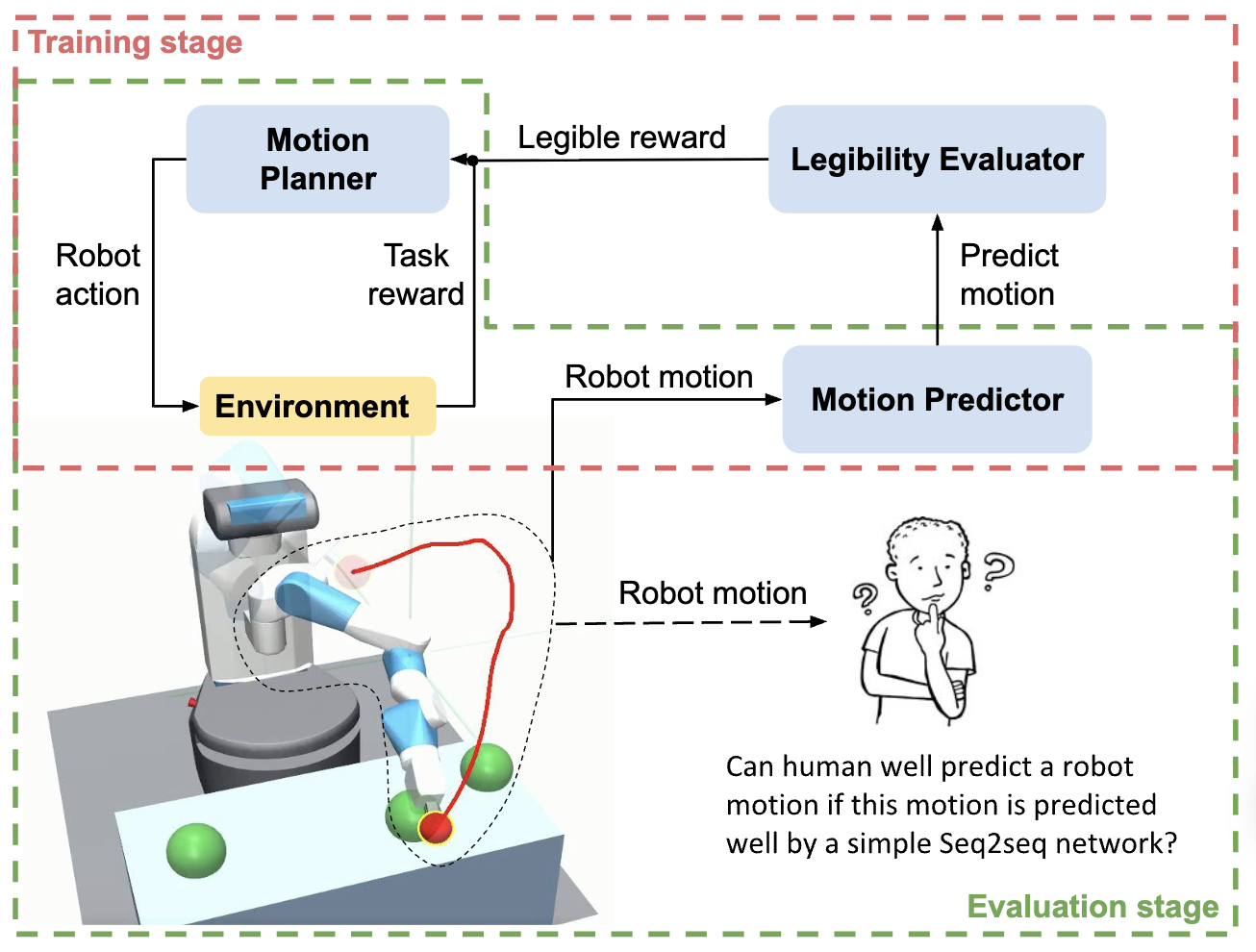
 An Actor-Critic Approach for Legible Robot Motion PlannerIn 2020 IEEE International Conference on Robotics and Automation (ICRA), 2020
An Actor-Critic Approach for Legible Robot Motion PlannerIn 2020 IEEE International Conference on Robotics and Automation (ICRA), 2020